|
|
BMe Research Grant |
|

PETHŐ Zsombor
BMe Research Grant - 2023
![]()
Kandó Kálmán Doctoral School of Transportation and Vehicle Engineering
BME Közlekedés- és Járműmérnöki Kar, Department of Automotive Technologies
Supervisor: Dr. TÖRÖK Árpád
The safety risk of inter-vehicular communication considering network performance and vehicle dynamics factors
Introducing the research area
Since modern vehicles are connected, and their operation processes are strongly supported by different automated functions, system failures, and even malicious interventions can critically impair safety integrity. Accordingly, there is a strong interaction between safety and security-related threats and menaces. Packet loss and latency represent the disadvantageous characteristics of the wireless communication process [1] [2]. In most cases, we cannot eliminate packet loss completely, just mitigate it, therefore the reliability of the vehicular system can be increased by estimating the safety risk in advance based on the network performance parameters. Accordingly, my research focuses on quantifying safety risk based on network performance metrics and vehicle dynamics factors.
Brief introduction of the research place
My research is carried out at the Department of Automotive Technologies of BUTE, in the Automotive Safety and Security research group led by Dr. Árpád Török. The main focus of the group is the integrated modeling of safety and cyber security aspects related to vehicle development processes to mitigate the safety risks associated with complex highly automated vehicle systems. The department closely cooperates with the leading industrial stakeholders and research centers in the field.
History and context of the research
Highly automated vehicle systems of the future will be connected via V2X (Vehicle-to-everything) communication. Therefore, a huge amount of information will have to be transmitted through this channel. Wireless communication failures can lead to the loss of safety-critical information, and if this information is not available (either due to a cyberattack or unintentional system failure) then the vehicular system can make unsafe decisions [3].
The research goals, open questions
The reliability of V2X communication [1] can be reduced due to the degradation of network performance (packet loss, latency), affecting many ADAS (Advanced Driver-Assistance System) applications. The goal of the research was to estimate and quantify the safety risks associated with V2X communication when the network is not good enough, considering the vehicle dynamics. Accordingly, my aim was to develop a framework capable of characterizing and numerically evaluating highly automated automotive systems by estimating their risk function with regard to the investigated operational design domain and, at the same time to estimate the risk based on the quality of service of the wireless communication in real-time. This objective urges the development of a mathematical model which describes the nonlinear relationship between cyber-physical parameters.
Methods
Firstly, I used Design of Experiments (DoE) to design the driving scenarios, which were performed on a real proving ground. Based on the recorded dataset, I extracted the relevant information in order to explore the nonlinear relationship and correlation between the outcome variable and the factors under investigation. I used Ordinary Least Squares (OLS) with polynomial regression to develop the identified risk indicators (Safety Risk Index -SRI, Severity Index - SI). The SRI indicator, in addition to physical factors, considers cyberspace-related network performance parameters for calculating the safety risk that characterizes the reliability and quality of digital communication, such as packet delivery ratio (PDR) and end-to-end latency (E2E). The SI indicator describes the severity of the accident. The severity of the accident is estimated based on the energy of the collision and so the kinetic energy changes of the vehicles.
As a third indicator, I introduced Message Reception Rate (MRP) to evaluate whether the system receives a message in the critical time period or not. Since the outcome variable of the MRP indicator can have two values (i.e., “successful” or “failed”), it was analytically reasonable to use binomial regression.
Following this, I estimated the best-fitting polynomial function linking the explanatory variables and the dependent variable.
In line with the predefined concept, as a final step of the development process, I identified the safety risk surface in accordance with the ISO26262 functional safety standard’s risk definition as the product of probability and severity.
Results
Developing a research methodology for literature review
I have developed a generally applicable research methodology based on machine learning methods suitable for determining the future research orientations of a specific investigated research field. I have demonstrated the applicability of the developed methodology in investigating the future research orientations of modern vehicle systems. Based on the results of the implemented research methodology, I identified inter-vehicular communication and artificial intelligence as the most intensively investigated future topics of automotive cybersecurity.
Developing safety risk evaluation methodology
I have developed a method for evaluating the vehicle safety risk of communication parameters sensitive to cyberattacks focusing on certain inter-vehicular communication-based collision-avoidance assist systems. The vehicle safety risk was represented as a function of severity and probability.
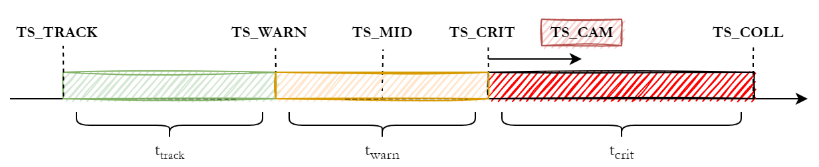
1. Figure Safety intervals during a longitudinal scenario [S2].
I have developed a procedure that can be used during the development processes of certain inter-vehicular communication-based collision warning systems, which provides the opportunity to determine the relationship between the aspects of vehicle safety, functionality, and efficiency. I have confirmed that the developed Safety Risk Index (SRI) is suitable for characterizing safety risk.
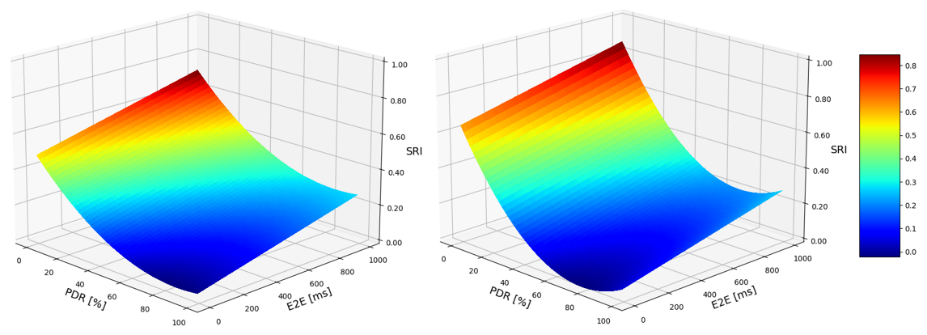
2. Figure Safety Risk Index estimation function based on PDR and E2E parameter values (highway scenario) [S2].
Applying the developed framework for quantifying PKI impact on safety
I have
developed a methodology to quantify the safety impact of the public key
infrastructure (PKI) -based authentication procedure for inter-vehicular
communication.
Improving methodological framework with co-simulation to investigate DoS attack impact on vehicle safety
I developed a co-simulation concept for investigating the impact of Denial-of-service (DoS) type cyber-attacks on vehicle safety for connected vehicles, taking into account relevant vehicle dynamics factors. I quantified safety risk with the new approach, depending on the vehicle dynamics and cyberattack parameters.
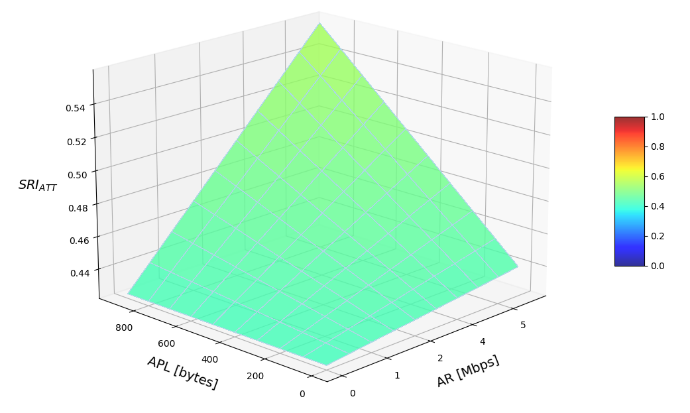
3. Figure The developed safety risk estimation function depending on attack rate (AR) and attack packet length (APL) [S7].
I developed a risk classification system to evaluate denial-of-service type cyberattacks-related driving scenarios, considering the vehicle dynamics factors under investigation and the fundamental characteristics of cyber-attacks.
Expected impact and further research
The developed safety risk evaluation framework is able to contribute to vehicle safety risk assessment in C-ITS environment and enhance the trustworthiness of highly automated vehicle systems.
The method can support online (real-time), and offline (ex-post analysis) estimation of safety risk based on vehicle dynamics and Quality of Service (QoS) parameters.
It can support the development and implementation of adaptive (cyber) protection strategies and V2X-based ADAS / ADS applications/functions safety risk-based testing considering the wireless network performance, independently from the physical layer (it is applicable to ITS-G5, C-V2X, and 5G NR too).
In further research, I would like to pay special attention to the spatial extension of both the test evaluation methodology and the real-time risk estimation framework to obtain a procedure that can be widely used for V2X-based ADAS / ADS applications.
The complex risk estimation framework developed in this research can further contribute to risk-based autonomous vehicle control models.
Publications, references, links
List of corresponding own publications.
[S1] Pethő, Z., Török, Á., & Szalay, Z. (2021). A survey of new orientations in the field of vehicular cybersecurity, applying artificial intelligence-based methods. Transactions on Emerging Telecommunications Technologies, 32(10), e4325. (Q2, IF 3.31)
[S2] Pethő, Z., Szalay, Z., & Török, Á. (2022). Safety risk-focused analysis of V2V communication, especially considering cyberattack sensitive network performance and vehicle dynamics factors. Vehicular Communications, 37, 100514. (D1, IF 8.373)
[S3] Török, Á., & Pethő, Z. (2020). Introducing safety and security co-engineering related research orientations in the field of automotive security. Periodica Polytechnica Transportation Engineering, 48(4), 349–356.
[S4] Petho, Z., Khan, I., & Torok, Á. (2021). Analysis of security vulnerability levels of in-vehicle network topologies applying graph representations. Journal of Electronic Testing, 1–9. (Q4, IF 0.795)
[S5] Tihanyi, V., Rövid, A., Remeli, V., Vincze, Z., Csonthó, M., Pethő, Z., ... & Szalay, Z. (2021). Towards cooperative perception services for ITS: Digital twin in the automotive edge cloud. Energies, 14(18), 5930. (Q1, IF 3.252)
[S6] (accepted, under publishing) Pethő, Z., Kazár, T. M., Kraudy, R., Szalay, Z., & Török, Á. (2023). Investigating the safety effect of PKI authentication in automotive systems, Acta Polytechnica Hungarica (IF 1.711)
[S7] (submitted, under review) Pethő, Z., Kazár, T. M., Szalay, Z., Török, Á. (2022). Assessing the Safety Consequences of DoS Attacks in VANETs. IEEE Transactions on Systems, Man, and Cybernetics (D1, IF 11.471)
[S8] Pethő, Z., Kazár, T. M., Kraudy, R., Szalay, Z., & Török, Á. (2022, October). Considering PKI safety impact on network performance during V2X-based AD/ADAS function development processes. In 2022 IEEE 1st International Conference on Cognitive Mobility (CogMob) (pp. 000135–000140). IEEE.
[S9] Kazár, T. M., Pethő, Z., Vida, G., & Török, Á. (2022). Simulation of Road Traffic Accidents Related to ADAS Systems in PreScan. In The First Conference on ZalaZONE Related R&I Activities of Budapest University of Technology and Economics 2022 (pp. 39–43). Budapest University of Technology and Economics.
[S10] Pethő, Z., Mesquita, F., & Török, Á. (2021) The effect of safety and security on cognitive processes related to future transport systems. 12th IEEE International Conference on Cognitive Infocommunications, CogInfoCom 2021
[S11] Pethő, Z., Török, Á. (2021) Intelligens rendszerek hatása a közlekedésbiztonságra, XXII Közlekedésfejlesztés Magyarországon – konferencia
Table of links.
https://auto.bme.hu/kutatas/#biztonsag-es-vedelem
https://www.automateddrive.bme.hu/department/safety-and-security-team
List of references.
[1] Thunberg, J., Bischoff, D., Schiegg, F. A., Meuser, T., & Vinel, A. (2021). Unreliable V2X communication in cooperative driving: Safety times for emergency braking. IEEE Access, 9, 148024–148036.
[2] Jacobsson, M., & Rohner, C. (2019). Link quality estimation for arbitrary packet sizes over wireless links using packet reception events. International Journal of Communication Systems, 32(16), e4115.
[3] Geva, M., Herzberg, A., & Gev, Y. (2013). Bandwidth distributed denial of service: Attacks and defenses. IEEE Security & Privacy, 12(1), 54–61.