|
|
BMe Kutatói pályázat |
|

Gyenes Zoltán Bálint
BMe kutatói pályázat - 2021
![]()
Villamosmérnöki Tudományok Doktori Iskola
BME-VIK, Irányítástechnika és Informatika Tanszék
Témavezető: Gincsainé Dr. Szádeczky-Kardoss Emese
Autonóm robotok és járművek mozgástervezése dinamikus környezetben
A kutatási téma néhány soros bemutatása
Korunk technológiai fejlődésének egyik zászlóshajója a robotika. Az automatizálás következtében gyárak és kórházak ezrei alkalmaznak már mobilis robotokat és robotkarokat, melyek segítségével az emberi munkaerő tehermentesítésére nyílik lehetőség. A mesterséges intelligencia térnyerésével olyan feladatokat tudunk már robotokra bízni, melyekről korábban álmodni sem mertünk volna. Mobilis robotok mozgása során különböző szempontrendszerek figyelembevételével kell megvalósítani a mozgástervezést (pl. gyorsaság, biztonság). Természetesen az összes kritérium együttes betartására nincsen lehetőség, ezáltal kompromisszumos megoldás megvalósítása szükséges, ütközésmentes mozgást biztosítva a robot számára a környezetében található akadályok között. A kutatás célja olyan újszerű mozgástervező módszerek kidolgozása, melyek felhasználásával különböző aspektusok együttes figyelembevételére nyílik lehetőség.
A kutatóhely rövid bemutatása
Kutatásomat a BME-VIK Irányítástechnika és Informatika Tanszék Irányítástechnika és robotika csoportjában végzem. A kutatócsoportban nagy szerepet játszik a robotika, azon belül a robotok pálya- és sebességprofiljának meghatározása mozgástervező algoritmusok segítségével. A kutatócsoportban rendelkezésre álló szakmai tudás és eszközök nagymértékben hozzájárulnak a kutatás sikeres elvégzéséhez.
A kutatás történetének, tágabb kontextusának bemutatása
Mobilis robotok mozgástervezése dinamikus környezetben komplex feladatnak számít, mivel a robot munkaterében a statikus akadályokon kívül mozgó akadályok is jelen vannak. Amennyiben egy térkép áll rendelkezésre a robot környezetéről, akkor globális mozgástervező algoritmusok [1], [2] alkalmazhatóak. Ellenkező esetben a robot csak érzékelőivel tud információhoz jutni; ekkor a reaktív mozgástervező algoritmusok alkalmazhatóak [3], [4], [5]. Az adott mozgástervező algoritmusnak legfőbb célként ütközésmentes mozgást kell megvalósítania az adott kezdőpozíció és célpozíció között.
A legismertebb reaktív mozgástervező algoritmusok esetén (Dynamic window (DW) módszer [6], Artifitial Potential Field (APF) módszer [7], Velocity Obstacle (VO) módszer [3], Inevitable Collision State módszer [8]) az ütközésmentes mozgástervezés megvalósítása mellett a leggyorsabb célelérés a legfőbb prioritási szempont. A mozgástervezés további szempontjai, vagy kritériumai (pl. sávtartás, KRESZ szabályok megtartása) ezen mozgástervező algoritmusok esetén más vezérlési szinten valósulnak meg (amennyiben szerepet játszanak a mozgástervezés során). Továbbá annak a lehetősége is fennáll, hogy bizonytalan szenzorinformációk esetén a leggyorsabb célelérést megvalósító módszer esetén ütközés történik a robot és környezete között.
A kutatás célja, a megválaszolandó kérdések
Kutatásom fő célja a VO módszer alapvető tulajdonságaiból kiindulva olyan dinamikus környezetben alkalmazható újszerű mozgástervezési módszer kidolgozása, mely reaktív tervezési szinten egyidőben képes figyelembe venni különböző mozgástervezési szempontokat. Első célom, hogy a mozgástervező algoritmus a biztonság és gyors célelérési tulajdonságokat adott (feladatfüggő) preferencia szerint tudja megvalósítani. Ezt követően a mozgástervező algoritmus kiterjesztése a cél olyan mértékben, hogy a sávtartási algoritmus megvalósítható legyen a mozgástervezési szinten. Az alapvető közlekedési szabályok, KRESZ szabályok figyelembevétele újabb kritériuma a mozgástervezésnek, melynek megvalósítása célja a munkámnak.
Ezt követően olyan mozgástervező algoritmus bevezetése a cél, amely a különböző akadályok esetén figyelembe tudja venni, hogy az adott akadályról érkezett adaptívan változó információ (pl. pozíció, sebesség) mennyire megbízható, ezt követően választja ki a robot számára a sebességvektort minden egyes mintavételi időegységben. Az algoritmus kiterjesztéseként feltételezhető, hogy a szenzorinformációk bizonytalansága az akadályok robottól való távolságának függvényében adaptívan változik.
Továbbá a célkitűzések között szerepel egy újszerű Particle-filter-alapú állapotbecslő módszer bevezetése, amelynek a felhasználásával az ágensen elhelyezett LiDAR-szenzor mérési adatokat felhasználva a robot munkaterében található akadályok állapotvektora becsülhető.
Módszerek
Kutatásom során a Velocity Obstacles (VO) módszer alapvető tulajdonságait használtam fel. Mind az akadályok, mind a robot kör alakú objektumokkal reprezentálhatók. Kezdetben nullára csökkentjük a robot sugarát, megnövelve az akadályok sugarát a robotsugárral. A módszer felhasználásával az ágens számára minden mintavételi időpillanatban meghatározhatók azon sebességek halmaza (VO halmaz), melyből sebességvektort választva egy adott jövőbeli időpillanatban ütközés történne a robot és az adott akadály között. Az elérhető sebességek térrészéből (RV) kivonva az ütközést okozó sebességek térrészét megkapható az elérhető elkerülő sebességek (RAV) térrészének halmaza. Különböző stratégiákat felhasználva, ezen RAV térrészből sebességet választva a robot számára ütközésmentes mozgást lehet megvalósítani az ágens és munkatere között.
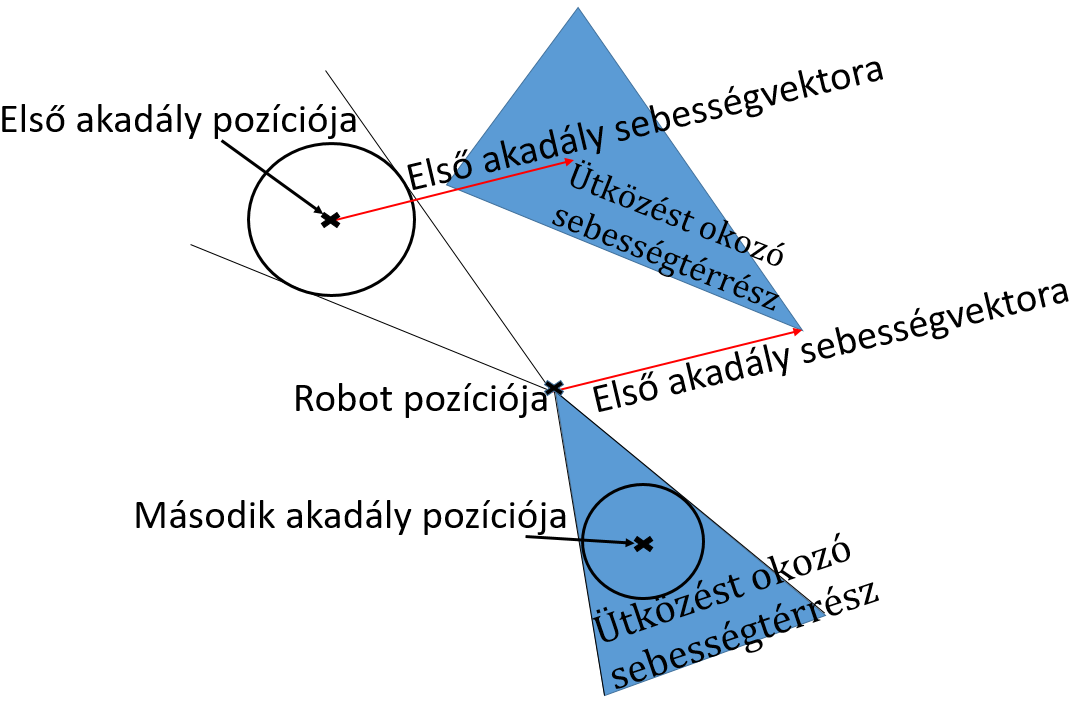
1. ábra: Ütközést okozó sebességtérrészek ábrázolása a robot munkaterében
Az akadályok állapotának (pozíció- és sebességvektorának) becslésére lehetőség
nyílik az úgynevezett Particle filter (részecskeszűrő) -algoritmus
továbbfejlesztésével. A korábbi szakirodalmat végigtekintve, a részecskeszűrőt
a robot saját állapotának meghatározására alkalmazták az ágensen elhelyezett
szenzorok mérési adatainak felhasználásával. A részecskeszűrő a becsült
állapot meghatározásához egy súlyozott részecskehalmazt használ. Egy részecske
az akadály lehetséges állapotát szemlélteti (pozíció, sebesség), a hozzá
tartozó súly pedig azt határozza meg, hogy mekkora az esély arra, hogy az
akadály az adott részecske tulajdonságaival rendelkezik. Az algoritmus lépései
között szerepel a súlyok frissítése, az állapot becslése, újra-mintavételezés,
illetve a részecskék állapotának frissítése.
A roboton elhelyezett szenzor mérési pontossága nagymértékben befolyásolja a
mérések, és ezáltal a teljes állapotbecslő módszer pontosságát. Az
állapotbecslő módszer alkalmazása során egy LiDAR (Light
Detection and Ranging)
-szenzor került felhasználásra, amely működését tekintve az optikai reflexió
alapvető tulajdonságai alapján hajtja végre a távolságmérési feladatot.
Eddigi eredmények
Költségfüggvény-alapú mozgástervezés
Bevezettem egy újszerű mozgástervező módszert, amely során gyorsaságot és a biztonságot egyidőben lehet figyelembe venni a mozgástervezés során. A módszert Safety Velocity Obstacles módszernek (SVO-nak) neveztem el [I.], [II.], [III.].
Bevezettem egy újszerű módszert, melynek felhasználásával az ágens képes figyelembe venni az alapvető KRESZ szabályokat a mozgása során, az algoritmust Traffic Regulation Velocity Obstacle-nek (TRVO) neveztem el [IV.], [V.]. A szabályalapú mozgástervezést kiterjesztettem baloldali közlekedésre is a jobboldali közlekedésen kívül [IX.].
2. ábra: A CoppeliaSim (VREP) szimulációs környezetben kék színnel jelölt
robot mozgástervezése során a közlekedési szabályok betartásával bal oldalról
előzi meg az előtte kisebb sebességgel mozgó akadályt, így éri el a
célpozíciót
Munkám során kidolgoztam egy mozgástervező algoritmust, melynek a felhasználásával egyenes sávok [VI.], illetve másodfokú Bézier-görbékkel megadott általános alakú és görbületű sávok [VII.] esetén is megvalósítható az ütközésmentes célelérés a robot számára a sávtartási algoritmust is figyelembe véve.
Összefoglalva: kidolgoztam egy újszerű reaktív mozgástervező algoritmust a VO módszer alapjait felhasználva, mely egy költségfüggvény alapú minimalizálást alkalmazva a reaktív mozgástervezési szinten különböző kritériumokat tud párhuzamosan figyelembe venni ütközésmentes mozgástervezést teljesítve az ágens és környezete között.
Bizonytalanság-alapú reaktív mozgástervezés
A mozgástervezés során a robot munkaterében található akadályokról több esetben pontatlan információk állnak rendelkezésre, mely megnehezíti az ágens sikeres, ütközésmentes mozgását.
A korábbiakban bevezetett mozgástervezési algoritmust kiterjesztettem úgy, hogy a különböző akadályok esetén eltérő bizonytalansági tényezőt figyelembe lehessen venni [VIII.], [IX.]. Ez alapján a nagyobb bizonytalansággal rendelkező akadálytól távolabb hajtja végre a mozgástervezést, a kis bizonytalansággal rendelkező akadály esetében az akadályhoz közeli manővert megvalósító mozgástervezés is engedélyezett. Ezt követően kidolgoztam egy algoritmust az adaptívan változó bizonytalanságok kezelésére is [X.].
3. ábra: A videó szemlélteti a robot célelérését abban az esetben, amennyiben
a két (kék és lila színű) akadály különböző bizonytalansági paraméterekkel (α)
rendelkezik. A különböző színű mozgó robotok a különböző esetek esetén történő
ütközésmentes mozgástervezés eredményét szemléltetik. A gyorsasági paraméter
(β) szintén változik a különböző esetekben.
Bevezettem újszerű Particle-filter-alapú állapotbecslő módszert, amelynek felhasználásával az ágensen elhelyezett LiDAR-szenzor mérési adatait felhasználva a robot munkaterében található akadályok pozíciója [XI.] –, illetve a módszert kiterjesztve – sebességvektora [XII.] is becsülhető.
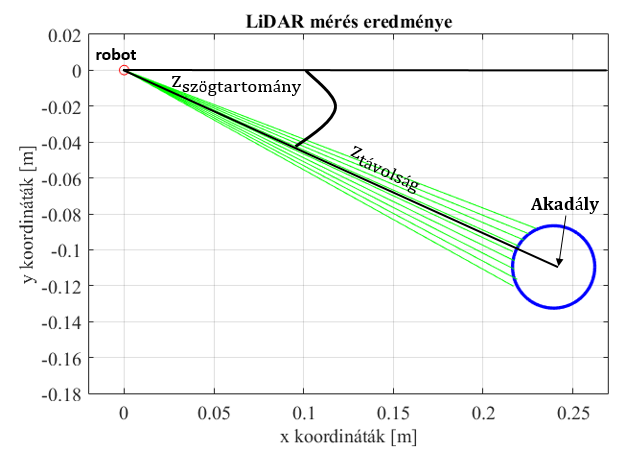
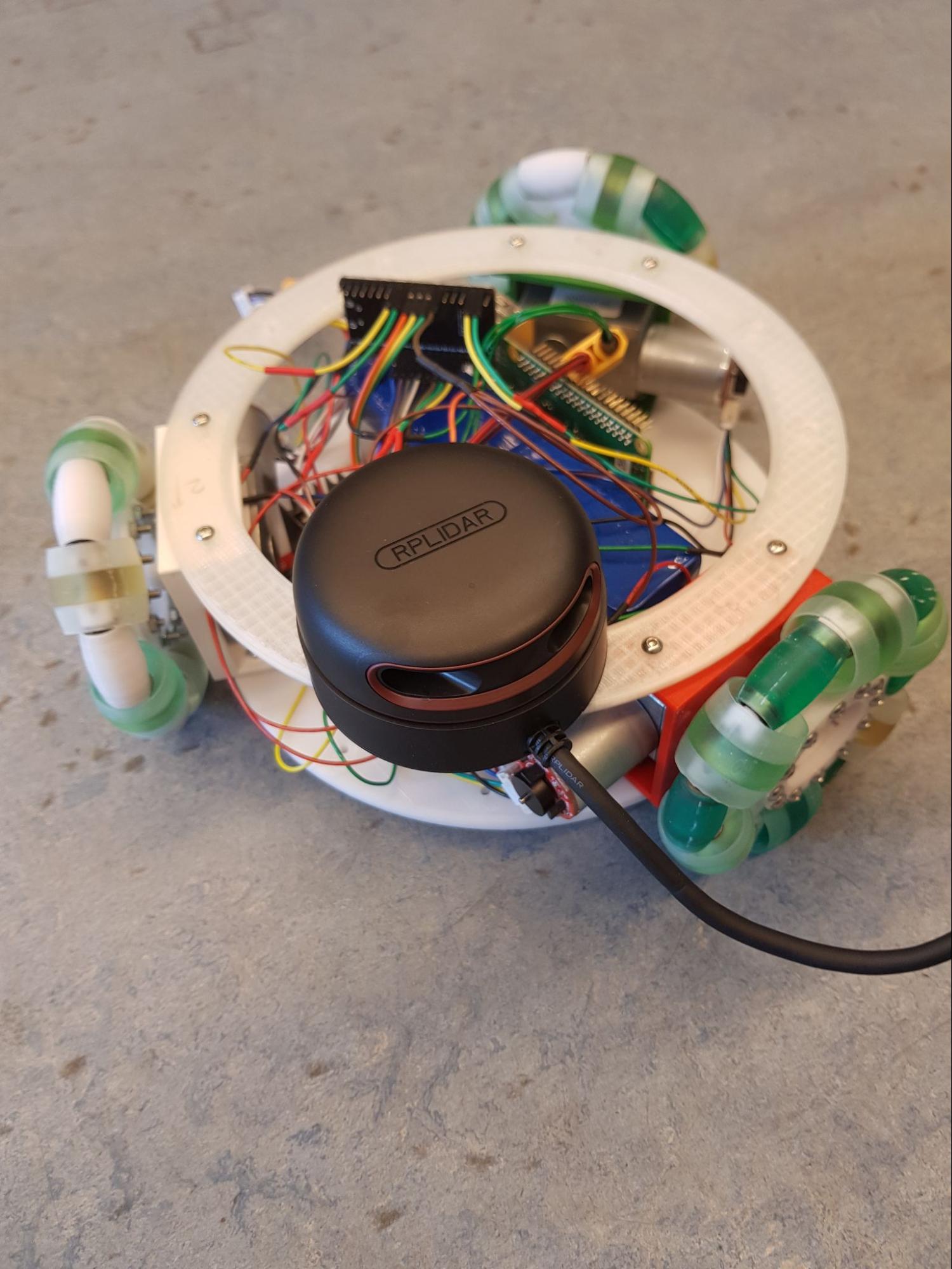
4. ábra: LiDAR-szenzor-mérés egy akadály esetén. A bal oldali képen látható a LiDAR-szenzor mérési eredménye és a becsült akadály távoltág (ztávolság), illetve szög (zszögtartomány). A jobb oldali ábra mutatja az általunk épített mobilis roboton elhelyezett LiDAR-szenzort.
Várható impakt, további kutatás
Az eddigi eredményeket számos hazai és nemzetközi konferenciacikkben közöltük, illetve két angol nyelvű folyóiratcikk is megjelent a különböző bevezetett mozgástervező algoritmusok leírásából. A további eredményeket szeretnénk hazai és nemzetközi folyóiratcikkekben közölni. A kutatási eredményekből született impaktot növeli a következő időszakban elnyert DAAD-ösztöndíj, melynek során lehetőség adódik egy német kutatócsoporttal történő együttműködésre.
A kidolgozott mozgástervező algoritmust a jövőben fel lehetne használni
gyárakban és kórházakban szállítási feladatokat ellátó kisméretű mobilis
robotok ütközésmentes mozgástervezésére. A mozgástervező algoritmus autószerű
mobilis robotokra történő kiterjesztésével a módszer felhasználható lehet az
önvezető autók biztonságos, ütközésmentes mozgástervezésében is. Ezáltal a
jövőben számos lehetőség ígérkezik ezen mozgástervező algoritmus
felhasználására és továbbfejlesztésére.
Saját publikációk, hivatkozások, linkgyűjtemény
Kapcsolódó saját publikációk listája.
[I.] Emese, Gincsainé Szádeczky-Kardoss; Zoltán, Gyenes: Velocity obstacles for car-like mobile robots: Determination of colliding velocity and curvature pairs; ADVANCES IN SCIENCE TECHNOLOGY AND ENGINEERING SYSTEMS JOURNAL 3: 1 pp. 225–233., 9 p. (2018)
[II.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss Emese: Motion planning for mobile robots using the Safety Velocity Obstacles method, In: Drótos, Dániel; Vásárhelyi, József; Czap, László; Ivo, Petráš (szerk.) Proceedings of the 19th International Carpathian Control Conference (ICCC 2018), Szilvásvárad, Magyarország, IEEE, (2018) pp. 389–394., 6 p.
[III.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Mobilis robotok mozgástervezése az SVO és APF módszerekkel, In: Bihari, Erika; Molnár, Dániel; Szikszai-Németh, Ketrin (szerk.) Tavaszi Szél - Spring Wind 2019: III. Kötet, Budapest, Magyarország: Doktoranduszok Országos Szövetsége, (2020) pp. 42–55., 14 p.
[IV.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss, Motion planning for mobile robots using Traffic Regulation, In: Kiss, Bálint; Szirmay-Kalos, László (szerk.) Proceedings of the Workshop on the Advances of Information Technology, Budapest, Magyarország (2019) pp. 92–97., 6 p.
[V.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Traffic Regulation Velocity Obstacles method, In: Nawrocka, A.; Kot, A. (szerk.) 20th International Carpathian Control Conference, ICCC 2019, Wieliczka, Lengyelország, IEEE, (2019) Paper: 8766055, 6 p.
[VI.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: A novel concept of lane-keeping algorithms for mobile robots, In: Szakál, Anikó (szerk.) IEEE 17th International Symposium on Intelligent Systems and Informatics Proceedings, Sisy 2019, Szabadka, Szerbia: IEEE Hungary Section, (2019) pp. 47–52., 6 p.
[VII.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Novel Motion Planning Method for Mobile Robots Using Velocity Obstacle, ACTA POLYTECHNICA HUNGARICA 17: 9 pp. 221-240., 20 p. (2020)
[VIII.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Velocity selection for mobile robots using different strategies and probability, In: Kiss, Bálint; Szirmay-Kalos, László (szerk.) Proceedings of the Workshop on the Advances of Information Technology 2020, Budapest, Magyarország: BME VIK Irányítástechnika és Informatika Tanszék, (2020) pp. 142–147., 6 p.
[IX.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Rule-based velocity selection for mobile robots under uncertainties, In: IEEE, Publisher (szerk.) IEEE 24th International Conference on Intelligent Engineering Systems Proceedings (INES 2020), Reykjavík, Izland, IEEE, (2020) pp. 127–132., 6 p.
[X.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Motion planning for mobile robots using uncertain estimations about the environment, In: Kiss, B; Harmati, I; Taqvi, Z (szerk.) 2020 23rd International Symposium on Measurement and Control in Robotics (ISMCR): Budapest, Magyarország, IEEE (2020) pp. 1–6., 6 p.
[XI.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Particle filter based obstacle’s position estimation using Lidar measurement data, In: Kiss, Bálint; Szirmay-Kalos, László (szerk.) Proceedings of the Workshop on the Advances of Information Technology (WAIT) 2021, Budapest, Magyarország: BME Irányítástechnika és Informatika Tanszék (2021) pp. 101–108., 8 p.
[XII.] Zoltán, Gyenes; Emese, Gincsainé Szádeczky-Kardoss: Particle filter-based perception method for obstacles in dynamic environment of a mobile robot, In: IEEE, Publisher (szerk.) IEEE 25th International Conference on Methods and Models in Automation and Robotics Proceedings (MMAR2021), Międzyzdroje, Lengyelország, IEEE, (2020), 6 p. (elfogadva)
Hivatkozások listája.
[1] S. M. LaValle. Planning Algorithms. Cambridge University Press, 2006.
[2] Chand, Praneel and Carnegie, Dale A.: A two-tiered global path planning strategy for limited memory mobile robots. Robotics and Autonomous Systems, vol. 60, no.2, pp. 309–321, 2012
[3] Paolo Fiorini and Zvi Shiller: Motion Planning in Dynamic Environments using Velocity Obstacles, The International Journal of Robotics Research July 1998 vol. 17 no. 7 760–772.
[4] Kovács, Bence and Szayer, Géza and Tajti, Ferenc and Burdelis, Mauricio and Korondi, Péter. A novel potential field method for path planning of mobile robots by adapting animal motion attributes. Robotics and Autonomous Systems, 82: 24–34, 2016.4.
[5] Michael Hoy, Alexey S. Matveev and Andrey V. Savkin: Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey, Robotica (2015) volume 33, pp. 463–497. © Cambridge University Press 2014
[6] D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robot. Autom. Mag., vol. 4, no. 1, pp. 23–33, Mar. 1997.
[7] Malone N, Chiang HT, Lesser K, et al. Hybrid Dynamic Moving Obstacle Avoidance Using a Stochastic Reachable Set-Based Potential Field. IEEE Transactions on Robotics. 2017;33(5):1124–1138.
[8] Fraichard T, Asama H. Inevitable collision states - A step towards safer robots. Advanced Robotics. 2004;18(10):1001–1024.