|
|
BMe Research Grant |
|

Basargan Hakan
BMe Research Grant - 2021
![]()
Kálmán Kandó Doctoral School of Transportation and Vehicle Engineerin
BME Közlekedés- és Járműmérnöki Kar, Department of Control for Transportation and Vehicle Systems
Supervisor: Dr. GÁSPÁR Péter
The integration of velocity and suspension control to increase automated driving comfort in autonomous road vehicles
Introducing the research area
Vehicle suspension has been a trending research topic for a long time due to its key role in road damage, ride comfort, vehicle safety, and stability, and overall performance of the vehicle. The semi-active suspension improves vehicle safety and driving comfort by minimizing the effect of road distortions and disturbances.
Analyzing oncoming road conditions and modifying the controller by these conditions are key points for the adaptive semi-active suspension control. Therefore, a control architecture should be designed to modify the online controller, considering the oncoming road conditions and vehicle velocity.
Brief introduction of the research place
This research is carried out at the Department of Control for Transportation and Vehicle Systems, Faculty of Transportation and Vehicle Engineering under the supervision of Dr. Gáspár Péter. This research conducted by Institute for Computer Science and Control was supported by the Ministry for Innovation and Technology and the National Research, Development, and Innovation Office within the framework of the National Lab for Autonomous Systems. This research was partially supported by the National Research, Development, and Innovation Office through the project 'Integration of velocity and suspension control to enhance automated driving comfort in road vehicles' (NKFIH 2018-2.1.13-TÉT-FR). The research was also partially supported by the Hungarian Government and co-financed by the European Social Fund through the project "Talent management in autonomous vehicle control technologies" (EFOP-3.6.3-VEKOP- 16-2017-00001).
History and context of the research
The semi-active suspension system plays a key role in the safety and
comfortable automated driving, while in autonomous vehicles the adaptation of
this system to different road conditions and vehicle velocities is
significant. There are several control approaches for semi-active suspension
control. The skyhook control strategy is commonly used in semi-active
suspension control [1,2]. Skyhook strategy is based on designing the active
suspension control so that the chassis is linked to the sky to reduce the
vertical acceleration of the chassis and the axle independently. It is easy to
implement with few status information, and effectively increases the driving
comfort of the vehicle, but disrupts the dynamic tire load. Both model
predictive control (MPC) [3] and hybrid model predictive control (Hybrid MPC)
methods are also commonly used but they still lack robustness properties, and
their application is not easy. Unlike previous methods,
![]() control
approach [4] guarantees road holding, vehicle stability, and driving comfort
performances, however, dynamic control reconfiguration is not possible due to
a fixed weighting of the performances. Reconfiguring the control is key in
controlling semi-active suspension systems to configure the controller
according to different road conditions. For instance, the damper needs to act
differently for each road irregularities, such as bumps, potholes, roughness,
etc. Thus, the control of semi-active suspension in this study is based on the
Linear Parameter-Varying (LPV) framework, due to its availability for dynamic
configuration by modifying the scheduling variable.
control
approach [4] guarantees road holding, vehicle stability, and driving comfort
performances, however, dynamic control reconfiguration is not possible due to
a fixed weighting of the performances. Reconfiguring the control is key in
controlling semi-active suspension systems to configure the controller
according to different road conditions. For instance, the damper needs to act
differently for each road irregularities, such as bumps, potholes, roughness,
etc. Thus, the control of semi-active suspension in this study is based on the
Linear Parameter-Varying (LPV) framework, due to its availability for dynamic
configuration by modifying the scheduling variable.
The research goals, open questions
According to a detailed literature review, publications related to similar research topics do not simultaneously address the integration of velocity design, oncoming road conditions, and the trade-off between vehicle safety, and driving comfort. This research flaw necessitates the design of a control architecture consisting of a velocity controller, a look-ahead controller, and a semi-active suspension controller. This control architecture ensures and enhances both automated driving comfort and vehicle safety by considering different velocities and road conditions.
The aim of this research is to integrate velocity and semi-active suspension control by considering oncoming road conditions to enhance automated driving comfort and ensure vehicle safety. To achieve this goal, a reconfigurable adaptive semi-active suspension controller has been designed and an energy-efficient velocity and look-ahead controller has been integrated. The road condition is known and stored in a cloud system. This adaptive semi-active suspension control is based on the Linear Parameter Varying (LPV) framework, where a trade-off between driving comfort and vehicle safety is possible with a dedicated scheduling variable. The targeted research was presented in the TruckSim simulation environment, which delivers the most accurate, detailed, and efficient methods for simulating vehicle performance.
Methods
The quarter-car model, which is most intensively used and employed model due to its simplicity and controllability has 2 degrees-of-freedom. The semi-active suspension control is designed on the LPV framework. Performance specifications must be defined to achieve the desired trade-off between road holding and driving comfort, and control force must also be considered. Therefore, to increase passenger comfort, the acceleration of the sprung mass should be minimized. Directional stability is guaranteed by minimizing the deflection of the suspension. To reduce side force fluctuations, the dynamic tire load must be kept to minimum to guarantee stability. Finally, to avoid actuator saturation, the control force must also be considered. The system then transforms into the state-space representation.
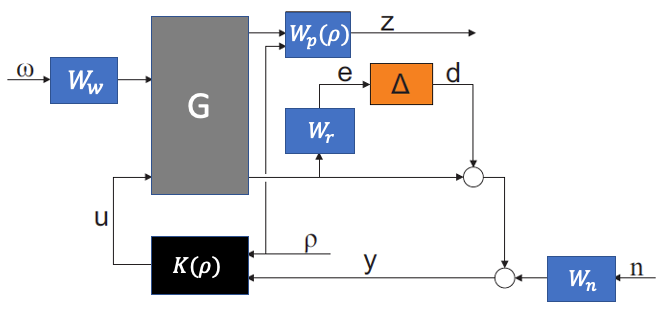
Fig. 1 Closed-loop interconnection structure.
The proposed
high-level controller is based on a weighting strategy formulated through a
closed-loop architecture shown in Fig. 1[S4].
 is
the quarter-car model,
is
the quarter-car model,
 is
the designed LPV controller with scheduling variable ⍴∈[0,1].
The purpose
of weighting functions given in
is
the designed LPV controller with scheduling variable ⍴∈[0,1].
The purpose
of weighting functions given in
 are
to keep the sprung mass acceleration (
are
to keep the sprung mass acceleration ( ),
the suspension deflection (
),
the suspension deflection ( ),
the tire deflection (
),
the tire deflection ( )
and control input (
)
and control input ( )
low over the desired frequency range[S2].
)
low over the desired frequency range[S2].
This research will use these capabilities of networking and computing technologies to improve on the safety and comfort of such equipped road vehicles. The complete system consists of the following: the vehicle is equipped with semi-active suspension system controlled by the LPV controller; the cloud system communicates with the vehicle, and gathers, processes, stores and distributes the data. The architecture of the proposed system is depicted in Fig. 2.
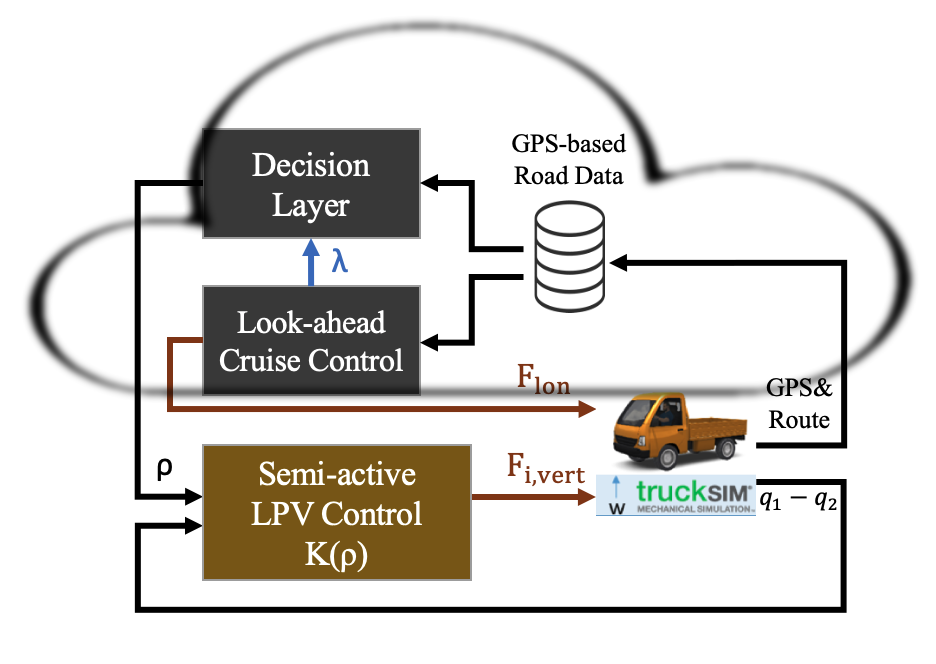
Fig. 2 Architecture of the system.
The cloud part of the system is implemented on a private infrastructure cloud, while the introduced architecture can be implemented on the other clouds without major modifications. As shown in Fig. 2, the vehicle is simulated for this paper using TruckSim software. The simulation environment is integrated with MATLAB, where it is possible to evaluate the controller test and connect to the cloud via a web API[S7]. The look-ahead controller and decision layer algorithm run in the cloud system, while prehistoric road data is also stored here. The on-board unit collects the measurements data from the suspension and uploads it to the cloud, then the cloud application builds a road-information database by gathering information from vehicles, and finally road irregularity, vehicle velocity and performance results, and the corresponding scheduling variable is calculated by the decision algorithm in the cloud.
The method for selecting the two different scheduling variable (decision layer) is described in [S1,S3]. In the first method[S1], the ISO 2631-1:1997 standard[5] is considered to categorize road distortions and irregularities. This standard characterizes the driving comfort based on the impact of the vibration on the drivers and passengers. The frequency-weighted vibration magnitude is calculated as the root mean square value of the vertical acceleration of the body. According to this categorization, the scheduling variable is selected considering previous simulations at different road conditions and velocities. The second method to reconfigure the controller depends on the previous historical data stored in the database. This calculation is based on the found algorithm[S3, S6].
Results
There are several simulations that demonstrate the effectiveness of the proposed system. Only one of these simulations result is explained here[S3]. The simulation was run in a TruckSim environment with a real geographical highway route. The effectiveness of the introduced method is demonstrated with two different simulations, these are the utility truck with adaptive semi-active suspension control and conventional semi-active suspension.
The simulation route is 3 km long with the following irregularities and selected scheduling variables for the adaptive suspension scenario: first several bumps(5cm) at 200 m with selected scheduling variable as 0.52, 10 cm bump at 950 m with ⍴=0.6, for second 10cm bump at 2000 m with ⍴=0.54, for second several bumps at 2200m with ⍴=0.47 and the final distortion sine sweep at 2650m with ⍴=0.5 and ⍴=1 for the flat road. In conventional suspension scenario, which is non-adaptive, scheduling variable is selected as 1.
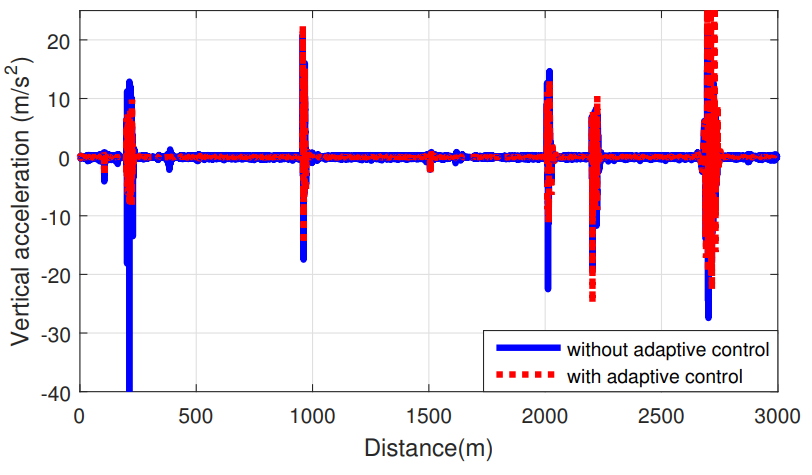
Fig. 3 Vertical acceleration.
The performance of the two simulated vehicles is compared. Fig. 3 shows that the vertical acceleration performance has been improved both in flat road and at the road distortions. The biggest change is in the first several bumps distortion, while the change for the sine sweep road category between adaptive and non-adaptive control is less significant.
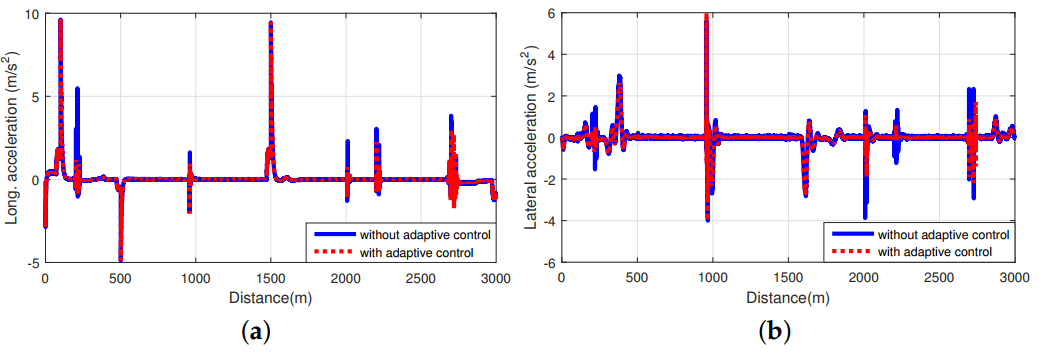
Fig. 4 (a) Longitudinal acceleration. (b) Lateral acceleration.
Although longitudinal and lateral accelerations are not performances, these values have also decreased with the introduction of adaptive control, see Fig. 4.
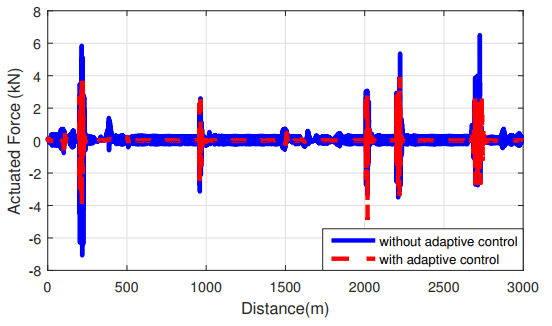
Fig. 5 Actuated force.
Minimizing the actuated force was also considered in the design process. Fig. 5 shows these actuated forces for each suspension. Significant changes have been shown with the adaptive control method.
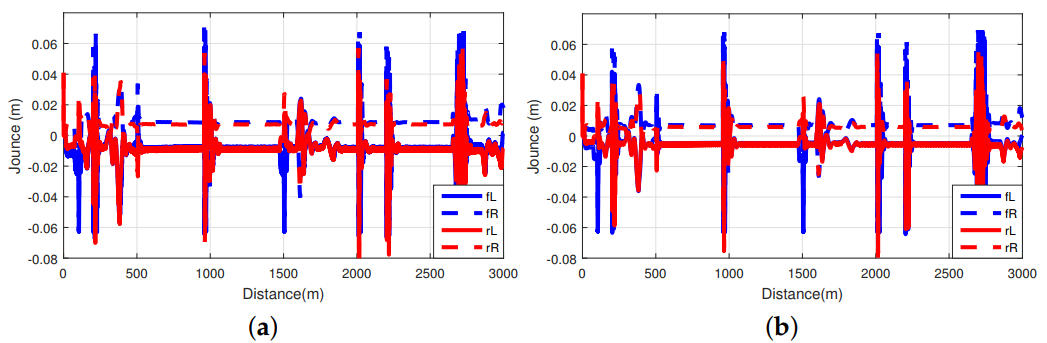
Fig. 6 (a) Suspension deflection without adaptive control. (b) Suspension deflection with adaptive control.
The deflection performance of the suspension related to vehicle stability and safety has also been improved with the introduction of the adaptive suspension system. These results are shown in Fig. 6.
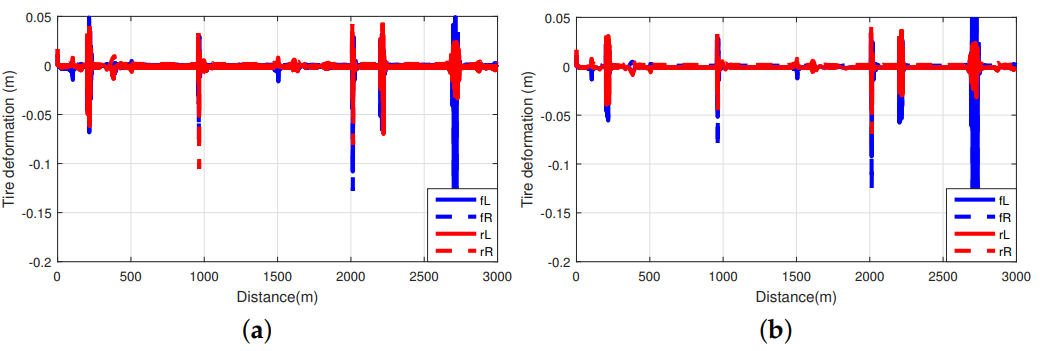
Fig. 7 (a) Tire deformation without adaptive control. (b) Tire deformation with adaptive control.
Another performance for road holding and vehicle safety is tire deformation. It has been shown in Fig. 7 that the amount of tire deformation was reduced with the proposed method.


(a) (b)
Fig. 8 (a) Adaptive control. (b) Non-adaptive.
The GIFs in Fig. 8 show vertical movement differences between adaptive and non-adaptive systems.
Expected impact and further research
It has been shown that the introduced method has improved driving comfort and vehicle safety in the simulation environment while this method can be integrated into the test vehicle. The adaptive semi-active suspension system will be used in future autonomous vehicles to enhance driving comfort and ensure vehicle safety. The designed semi-active suspension controller will be integrated into the autonomous vehicle and the introduced method will be used to reconfigure the semi-active suspension controller under different velocity and road conditions.
Further research can include the detection or estimation of road condition and distortion and integrating it to this system, instead of cloud-based road condition information.
Publications, references, links
List of corresponding own publications
[S1]Basargan, H., Mihály, A., Gáspár, P., Sename, O. (2020a) “Integrated multi-criteria velocity and semi-active suspension control based on look-ahead road information.”, In 28th Mediterranean Conference on Control and Automation, Saint-Raphaël, France, pp. 25–30, https://doi.org/10.1109/MED48518.2020.9182953
[S2]Basargan, H., Mihály, A., Gáspár, P., Sename, O. (2020b) “Adaptive semi-active suspension control considering look-ahead road Information and irregularities.”, In 17th Mini Conference on Vehicle System Dynamics, Identification and Anomalies, Budapest, Hungary.
[S3]Basargan, H., Mihály, A., Gáspár, P., Sename, O. (2021a) “Adaptive Semi-Active Suspension and Cruise Control through LPV Technique”, Applied Sciences, 11(1), 290, https://doi.org/10.3390/app11010290
[S4]Basargan, H., Mihály, A., Gáspár, P., Sename, O. (2021b) “Road adaptive semi-active suspension and cruise control through LPV technique.”, In European Control Conference 2021, Rotterdam, The Netherlands.
[S5]Basargan, H., Mihály, A., Gáspár, P., Sename, O. (2021c) “Fault-tolerant semi-active suspension control for degradation in damper performance.”, In 29th Mediterranean Conference on Control and Automation 2021, Bari, Puglia, Italy.
[S6]Basargan, H., Mihály, A., Gáspár, P., Sename, O. (2021d) “Road quality information based adaptive semi-active suspension control.”, Journal of Periodica Polytechnica Transportation Engineering (accepted).
[S7]Basargan, H., Mihály, A., Kisari, Á., Gáspár, P., Sename, O. (2021e) “Vehicle semi-active suspension control with cloud-based road information.”, Journal of Periodica Polytechnica Transportation Engineering (accepted).
List of references
[1]Shimoya, N., Katsuyama, E. (2019) “A Study of Vehicle Ride Comfort using Triple Skyhook Control for Semi-active Suspension System”, Transactions of Society of Automotive Engineers of Japan, 50(6), pp. 1631–1636, https://doi.org/10.11351/jsaeronbun.50.1631
[2]Liu, C., Chen, L., Yang, X., Zhang, X., Yang, Y. (2019) “General theory of skyhook control and its application to semi-active suspension control strategy design.”, IEEE Access, 7, pp. 101552–101560, https://doi.org/10.1109/ACCESS.2019.2930567
[3]Rathai, K. M. M., Sename, O., Alamir, M. (2019) “Reachability based Model Predictive Control for Semi-active Suspension System.” In 2019 Fifth Indian Control Conference (ICC), New Delhi, India, pp. 68–73, https://doi.org/10.1109/INDIANCC.2019.8715601
[4]Yu, S., Zhang, J., Xu, F., Chen, H. (2019) “ Control of Semi-Active MR Damper Suspensions.” In 12th Asian Control Conference, Orléans, France, pp. 337–342, https://doi.org/10.1016/j.ifacol.2019.09.042
[5]ISO(1997) "ISO 2631-1, Mechanical vibration and shock-Evaluation of human exposure to whole-body vibration", ISO.