 |
BMe Research Grant |

|

Gábor Baross Doctoral School of Transportation Sciences
BME Dept. of Control and Transport Automation
Supervisor: Dr. István Varga, PhD.
Modeling and intelligent control of road traffic
Short introduction of the research subject
The growth of the motorization rate together with the external consequences generates real challenges for traffic planners and traffic engineers. For example, today’s demand is not satisfied by traffic-responsive traffic lights using detector measurements. To assure sustainable mobility as well as a high quality of life in cities a complex strategy and a network-wide traffic control are needed. Such strategies should be based on proper traffic modeling and forecasting. Estimation and modeling as well as robust and optimal control of urban traffic constitute the most important parts of my research.
.
Short introduction of the research place
My research place is the Road Traffic Control Laboratory at the Department of Control and Traffic Automation. We play an active role in the BME Research University Program as coordinators of the JKL-P4 project as well as researchers of subject JKL-P4-T1. We maintain a good relationship with industrial partners. Therefore, the lab is well equipped with traffic controllers, signal heads, PLCs and traffic control client. In 2011, we won financial support (TÁMOP) for laboratory development, which enabled us to purchase variable message signs, micro- and macroscopic traffic simulators (VISSIM/VISUM).
History and wider context of the research
The intelligent and adaptive road traffic control realizes a classical control loop practically, i.e. measurement, estimation, control, reaction (Fig. 1). To design a system like this, it is indispensable to know the traffic states and appropriately model the network. Various measurement technologies exist, but the measurement of road traffic parameters is a complex problem and quite costly in general due to the devices, communication system and SW required. Still, creating efficient measurement systems in high traffic areas of cities cannot be avoided. Ideally, each road link of the network could provide traffic information (e.g. by loop detectors, camera, on-board units). A novel approach to this problem is traffic measurement and estimation through the events generated in the cellular phone network. One of my main research subjects is the applicability of mobile signaling events for traffic measurement. This research has been going on in our laboratory in cooperation with Nokia Siemens Networks to develop travel time estimator since 2011.
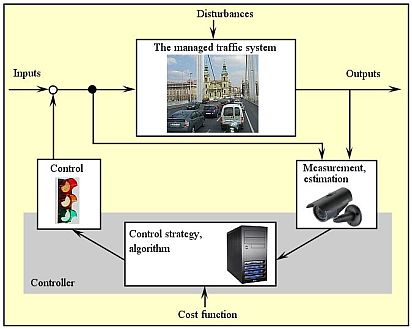
Figure 1: Control loop in road traffic management
If the states of the traffic network are known, model-based control can be designed. Thus, my other research subject is the optimal control for urban traffic networks. Naturally, several – already existing and functioning – methods are available in this field, which aim at increasing the capacity and improving other traffic parameters. However, the imprecision of the traffic model or the measurement system may cause ambiguities in the control system and thus can corrupt the optimal control. My research goal is to realize a robust control algorithm which is capable of handling uncertainties of the system.
The goal of the research, open questions
Application of cellular phone events in road traffic management
The use of signaling events of a cellular network opens the door to road traffic estimation and modeling at macro level. This can even be realized as real-time algorithm which may serve as a base for adaptive intelligent traffic management. The basic elements of cellular phone network (Fig. 2) are the cell (covered by the base station) and the Location Area (LA) combining several cells. Their shape depends on several factors and is never exactly circular. Anyway, just to to have feeling of the dimensions: the radius of cells is about a few hundred meters and that of the LA is about a few kilometers in urban areas.
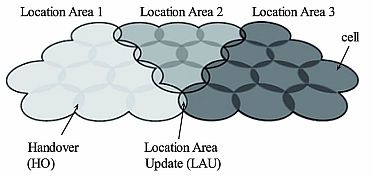
Figure 2: Schematic representation of the GSM network (Küpper, 2005)
Two characteristic events of the network are Handover (HO) and Location Area Update (LAU) which are generated by the transitions between the cells and LAs (Fig. 2). HO occurs when the mobile phone is in call and changes the cell. LAU is generated by idle phones (not in calls) changing the LA. HO/LAU events are automatically stored by the operator of the telecommunication network through base stations. The goal of my research is to develop efficient algorithms which exploit the information on HO/LAU events for traffic estimation.
Robust urban traffic control
The first approach using modern control theory for network-wide traffic control was published by Diakaki et al. (1999) by applying Linear Quadratic (LQ) optimization. As an enhancement, the application of Model Predictive Control (MPC) in road traffic was published in several papers (Tettamanti et al., 2008, Aboudolas et al., 2009). Moreover, decentralized realizations of MPC were also presented (de Oliveira & Camponogara, 2010, Tettamanti & Varga., 2010). These methods represent large amelioration compared to the traditional fixed-time control. However, they are not able to deal with state uncertainties (non-measurable traffic flow, e.g. parking, side street traffic) which may be present even in high quality measurement systems (Fig. 3). Hence, my research aim is to find and analyze an appropriate strategy with robust properties for control of urban traffic networks.
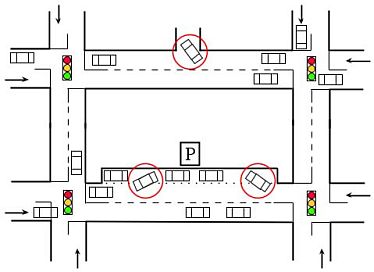
Figure 3: Typical model uncertainties in urban road traffic: side streets, parking lots
Methods
Measurement and estimation of urban traffic based on the cellular phone events
Mobile users leave traces in the traffic network through their HO/LAU events depicted in Fig. 2. These data can be efficiently utilized in an aggregate way to estimate traffic even in real-time mode. We propose the following two-step method. First, a trip matrix of the traffic network must be created. Trip or OD (origin-destination) matrix determines the traffic flows between each OD pair of the network (Fig. 4).
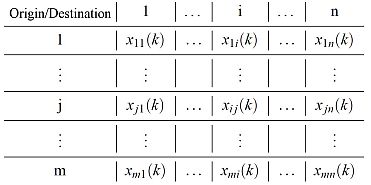
Figure 4: Structure of the OD-matrix (Luspay et al., 2011)
An OD matrix can be created through traditional methods (surveys) or by the appropriate use of LAU events (Calabrese et al., 2011). The second step of the method comprises the traffic assignment which is generally applied using the OD matrix. Typically, traffic assignment is an optimization procedure which determines the route choices with related traffic volumes between the OD pairs. The determination of potential paths through traffic assignment is an easy task. However, the traffic volumes assigned to the paths may easily become inaccurate since assignment considers generally “only” the data of the OD matrix and the network topology. A potential solution to the reliability problem is given by the use of HO events. Although HOs are generated only by phones in call, the typical traffic behaviors can be identified by collecting all of them. Practically, the trajectories revealed through HOs can be fitted to the paths defined by the traffic assignment. Therefore, more accurate estimates are provided concerning the traffic volumes.
Robust MPC based road traffic control
A novel approach to the control of urban traffic with uncertainty is represented by the use of robust MPC (Model Predictive Control). Practically, the method consists of a minimax optimization process in a rolling-horizon framework (Löfberg, 2003). The minimax traffic control intends to minimize the vehicle queue length while the maximal potential ambiguity is also taken into account. Rolling-horizon framework means that the controller predicts the states (queue lengths) and optimal control inputs for several sample times. Certainly, at the end of the given sample time only the green times of the first horizon are applied. Then, the system goes on for the next step and calculates repeatedly (Fig. 5).
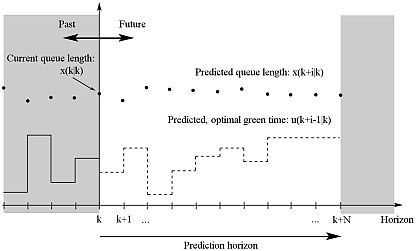
Fig. 5: The predictive control scheme
Results obtained so far
Revealing cellular phone trajectory by using HO data and traffic assignment
The first result of the research subject has already been published (Tettamanti et al., 2012). The paper presents the preparation step for the path-fitting method described above. For the modeling of radio cells the Voronoi tessellation was applied (Candia et al., 2008), which required only the coordinates of the base stations (Fig. 6).
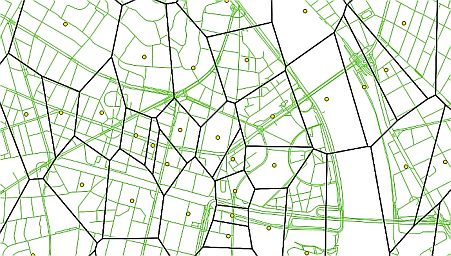
Figure 6: Voronoi tessellation for the modeling of radio cells
The method is represented through the results of a test measurement in Budapest. The cells provided by the HOs of the test device were fitted to the routes resulted from the traffic assignment. One path was found as the most likely one among the potential routes. Path 4 (Fig. 7) had the smallest squared deviation compared to the others.
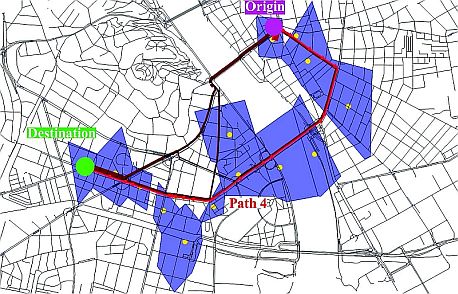
Figure 7: Path with the smallest squared deviation between the origin-destination pair
Real-time robust control for urban traffic networks
The robust MPC strategy presented above was validated by real-world traffic data with VISSIM traffic simulator. A test network was created based on a part of the topology of District VI of Budapest (Fig. 8). The control algorithm was implemented in MATLAB, which represents an SDP optimization practically. The whole simulation environment incorporates traffic simulation, measurement and control in a closed-loop (Tettamanti & Varga, 2012). Uncertainties were modeled as traffic flows of parking lots and side streets in the simulation. The results justify the raison d'etre of the robust strategy. An improvement of ~10-30% in traffic parameters was achieved compared to the traditional control methods. A closed-loop traffic control can be realized that is capable of providing optimal signal splits in a real-time fashion even if traffic disturbances are present. Therefore, the performance of urban traffic can be increased and congestions avoided. The theory of the method is provided in the book Forgalomirányítás (Traffic control) co-authored by me (Luspay et al., 2011).
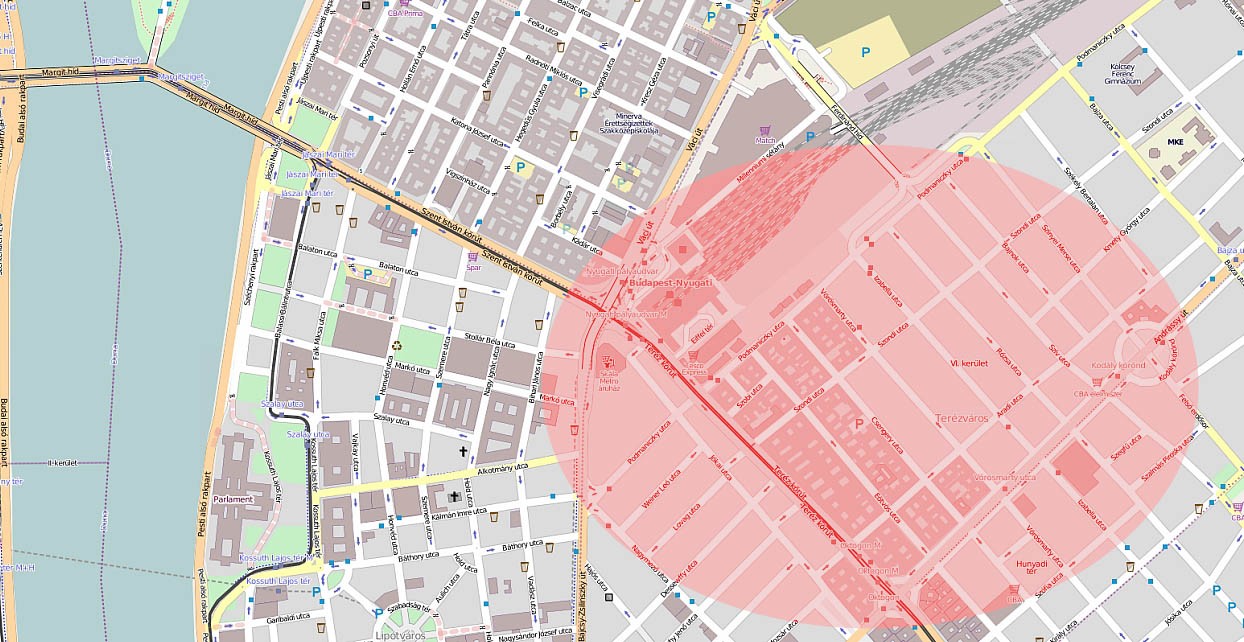
Figure 8: Test network in Budapest, District VI
Estimated impacts, further research
A prospective result of the research co-operation with Nokia Siemens Networks is a submitted patent (“Method and system for real-time travel time calculation in road traffic network using radio signaling data”), co-authored by me. The patent application is in approval stage. One of our articles is also under review at the TRC journal. Further impacts in 2012: participation at MITIP international conference (Tettamanti et al., 2012, Tettamanti & Varga, 2012), submitted publications in Acta Polytechnica Hungarica (Tettamanti et al., 2012) and Periodica Polytechnica (Tettamanti & Varga, 2012).
Both research topics presented above will be continued with extensions. First, I plan to investigate further possibilities in the field of mobile phone event based traffic applications as well as the efficient fusion of these data with other measurements (e.g. loop detector). The other research goal is to implement the robust urban traffic control in a decentralized system.
To get support for our new research projects, our department submitted two applications in this semester: OTKA application co-operated with Óbuda University and EIT ICT Labs project with ELTE.
My publications
Luspay, T., Tettamanti, T., Varga I.: Forgalomirányítás, Közúti járműforgalom modellezése és irányítása (in Hungarian), Typotex Elektronikus Kiadó Kft. ISBN 978-963-279-665-9, 2011
Tettamanti, T., Varga, I., Kulcsár, B., Bokor, J.: Model predictive control in urban traffic network management, In 16th Mediterranean Conference on Control and Automation, pages 1538–1543, Ajaccio, Corsica, France, 2008, CD ISBN: 978 1 4244 2505 1
Tettamanti, T., Varga, I.: Distributed traffic control system based on model predictive control, Periodica Polytechnica ser. Civil. Eng., Budapest, Hungary, 2010, Vol. 54/1, pp. 3-9, doi: 10.3311/pp.ci.2010-1.01
Tettamanti, T., Demeter, H., Varga, I.: Route choice estimation based on cellular signaling data, Acta Polytechnica Hungarica, Vol 4, 2012, in press
Tettamanti, T., Varga, I.: Development of road traffic control by using integrated VISSIM-MATLAB simulation environment, Periodica Polytechnica ser. Civil. Eng., Budapest, Hungary, 2012, Vol. 56, in press
Tettamanti, T., Ludvig, Á., Varga, I.: Travel time estimation in urban road traffic networks based on radio signaling data, MITIP, Budapest, Hungary, 2012
Tettamanti, T., Varga, I.: Urban road traffic estimation based on cellular signaling data, MITIP, Budapest, Hungary, 2012
Links
BME, Dept. of Control and Transport Automation
BME Research University Program JKL-P4 research project
Traffic assignment (Wikipedia)
Road Traffic Control Laboratory
Linear Quadratic Regulator (LQR)
Cellular network (Wikipedia)
Model Predictive Control (MPC) (Wikipedia)
SDP (Wikipedia)
Voronoi tessellation (Wikipedia)
References
Aboudolas, K., Papageorgiou, M., Kouvelas, A., Kosmatopoulos, E.: A rolling-horizon quadratic-programming approach to the signal control problem in large-scale congested urban road networks, Transportation Research Part C: Emerging Technologies, 18(5):680–694, 2010, Applications of Advanced Technologies in Transportation: Selected papers from the 10th AATT Conference
Calabrese, F., Di Lorenzo, G., Liang, L., Ratti, C.: Estimating Origin-Destination flows using mobile phone location data, 2011, Pervasive Computing IEEE, 10(4):36-44
Candia, J., González, M. C., Wang, P., Schoenharl, T., Madey, G., Barabási, A.-L.: Uncovering individual and collective human dynamics from mobile phone records. Journal of Physics A: Mathematical and Theoretical, 41(22):224015, 2008
Diakaki, C., Papageorgiou, M., Aboudolas, K.: Traffic-responsive urban network control using multivariable regulators, In International Conference on Modeling and Management in Transportation, Vol. 2, pp. 11-16, Poznan/Cracow, 1999
Küpper, A.: Location-based Services, John Wiley & Sons, 2005
Löfberg, J.: Minimax approaches to robust model predictive control. Ph.D. thesis, Linköping University, Sweden, 2003
de Oliveira, L. B., Camponogara, E.: Multi-agent model predictive control of signaling split in urban traffic networks, Transportation Research Part C: Emerging Technologies, 18(1):120-139, 2010, Information/Communication Technologies and Travel Behaviour; Agents in Traffic and Transportation